|
FACT++
1.0
|
|
FACT++
1.0
|
|
inlineprivatevirtual |
Is called continously to execute actions in the current state.
This is what the state machine is doing in a certain state continously. In an idle state this might just be doing nothing.
In the tracking state of the drive system this might be sending new command values to the drive based on its current position.
The current state of the state machine can be accessed by GetCurrentState()
Reimplemented from StateMachineImp.
Definition at line 1144 of file feedback.cc.
References Feedback::State::kCalibrating, FSC::State::kConnected, Feedback::State::kConnected, Feedback::State::kConnecting, BIAS::State::kConnecting, Feedback::State::kDimNetworkNA, Feedback::State::kDisconnected, BIAS::State::kVoltageOff, BIAS::State::kVoltageOn, Feedback::State::kWaitingForData, DimState::online(), Dim::SendCommandNB(), and DimState::state().
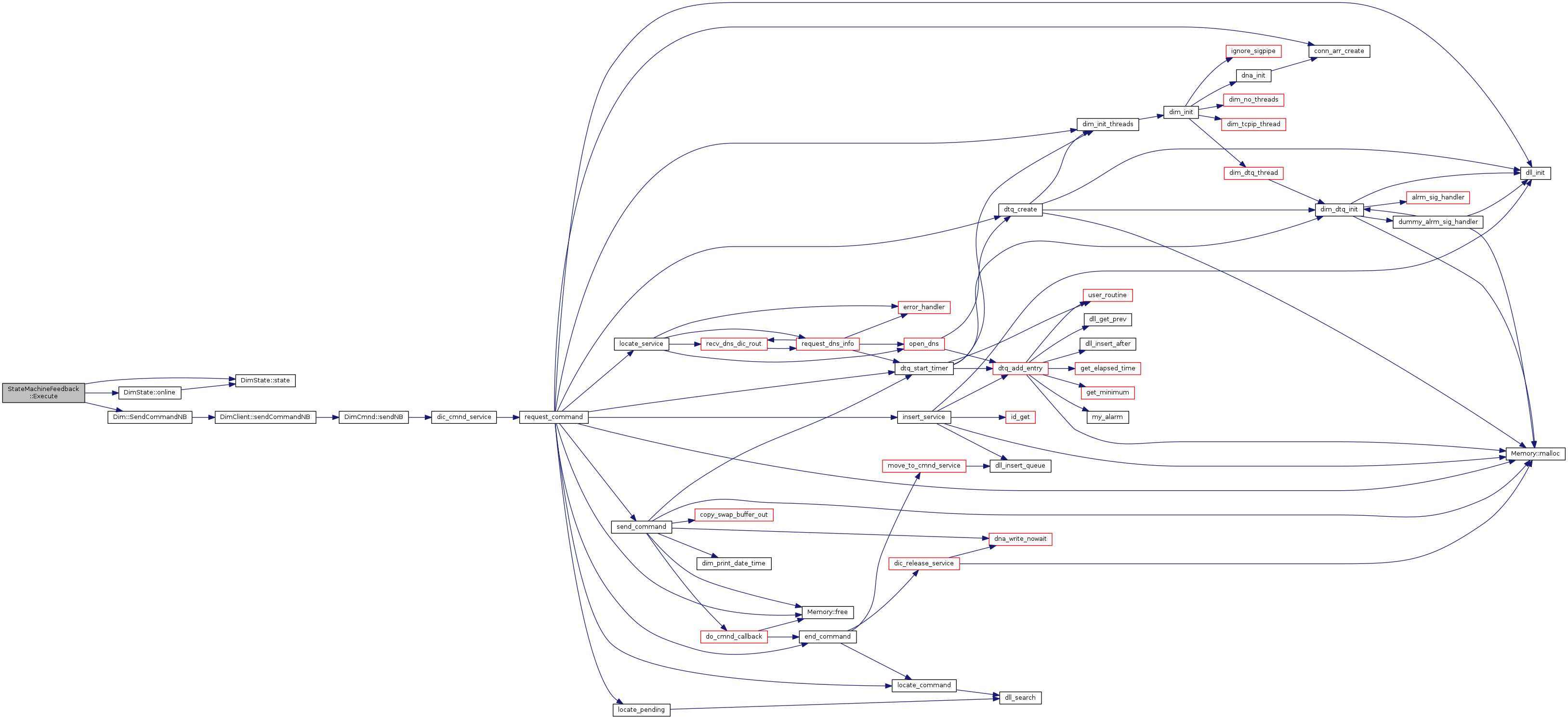
 Here is the call graph for this function:
Here is the call graph for this function: 1.8.11
1.8.11