Definition at line 578 of file lidctrl.cc.
References StateMachineLidControl< T, S >::Close(), Lid::State::kClosed, Lid::State::kConnected, Lid::State::kDisconnected, Lid::State::kInconsistent, Lid::State::kLocked, Lid::State::kMoving, Lid::State::kOpen, Lid::State::kOvercurrent, Lid::State::kPowerProblem, Lid::State::kUnidentified, Lid::State::kUnknown, StateMachineLidControl< T, S >::Open(), StateMachineLidControl< T, S >::Post(), StateMachineLidControl< T, S >::SetVerbosity(), and StateMachineLidControl< T, S >::Unlock().
584 "No connection to web-server could be established recently");
587 "Connection established, but status still not known");
590 "At least one lid reported a state which could not be identified by lidctrl");
593 "Both lids show different states");
596 "Arduino reports at least one lids in an unknown status");
599 "Arduino reports both lids to have a power problem (might also be that both are at the end switches)");
602 "Arduino reports both lids to have a overcurrent (might also be that both are at the end switches)");
605 "Both lids are closed");
608 "Both lids are open");
611 "Lids are supposed to move, waiting for next status");
614 "Locked, no commands accepted except UNLOCK.");
618 T::AddEvent(
"SET_VERBOSE",
"B")
620 (
"set verbosity state" 621 "|verbosity[bool]:disable or enable verbosity for received data (yes/no), except dynamic data");
633 (
"set verbosity state" 634 "|verbosity[bool]:disable or enable verbosity for received data (yes/no), except dynamic data");
638 (
"Unlock if in locked state.");
int Post(const EventImp &evt)
Adds some functionality to boost::posix_time::ptime for our needs.
int SetVerbosity(const EventImp &evt)
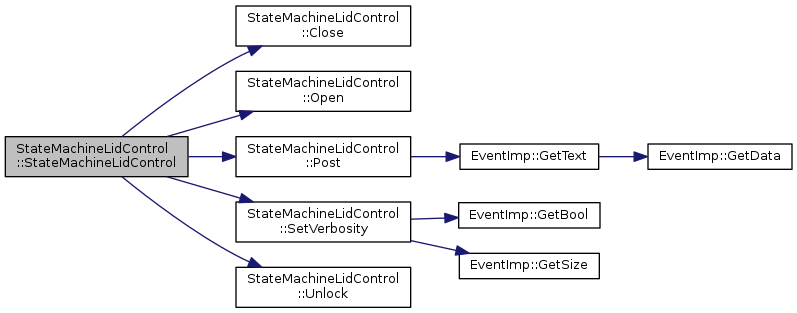
 Here is the call graph for this function:
Here is the call graph for this function: 1.8.11
1.8.11