|
FACT++
1.0
|
|
FACT++
1.0
|
|
inlineprivate |
Definition at line 124 of file mcp.cc.
References Agilent::State::kConnected, FTM::State::kTriggerOn, Dim::SendCommandNB(), and DimState::state().
Referenced by StateMachineMCP().
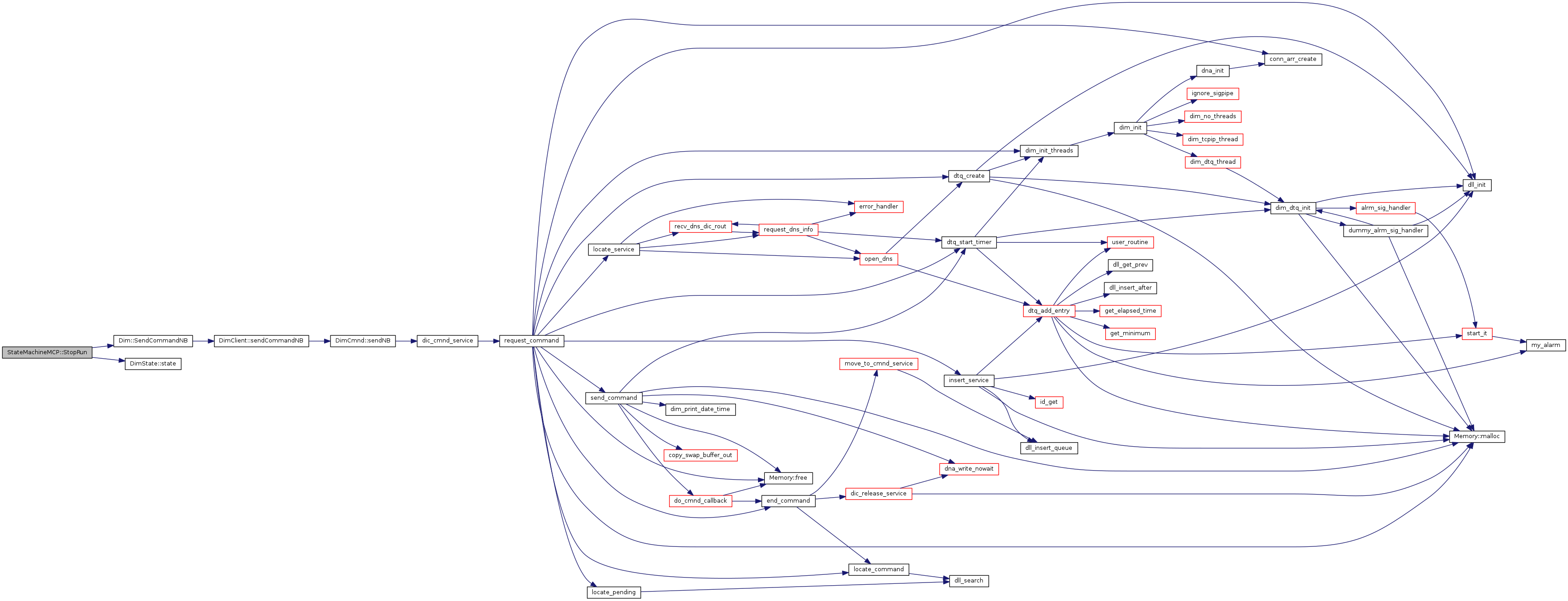
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function: 1.8.11
1.8.11