1345 vector<float> v(320);
1346 for (
int i=0;
i<320;
i++)
1347 v[
i] = d.
Ptr<uint16_t>()[
i] * 5000./4096;
1352 vector<float> val(320, 0);
1353 for (
int i=0;
i<320;
i++)
1359 const int idx = (hv.
hw()/9)*2+hv.
group();
1364 WriteCam(d,
"cam-biascontrol-current", val, 1000);
1366 const Statistics stat(v, 0, 3);
1381 out << setprecision(3);
1384 out << HTML::kWhite <<
'\t' << stat.min <<
'\n';
1385 out << HTML::kWhite <<
'\t' << stat.med <<
'\n';
1386 out << HTML::kWhite <<
'\t' << stat.avg <<
'\n';
1387 out << HTML::kWhite <<
'\t' << stat.max <<
'\n';
1388 out << HTML::kWhite <<
'\t' <<
"---\n";
1389 ofstream(
fPath+
"/current.data") << out.str();
int GetCurrentState() const
return the current state of the machine
bool CheckDataSize(const EventImp &d, const char *name, size_t size, bool min=false)
deque< float > fBiasControlCurrentHist
void WriteHist(const EventImp &d, const string &fname, const T &t, double scale, double offset=0)
const int32_t & state() const
DimDescribedState fDimFeedback
float fBiasControlPowerTot
static const string kWhite
uint64_t GetJavaDate() const
float fBiasControlCurrentMed
float fBiasControlCurrentMax
void WriteCam(const EventImp &d, const string &fname, const T &t, double scale, double offset=0)
const T * Ptr(size_t offset=0) const
const PixelMapEntry & hv(int board, int channel) const
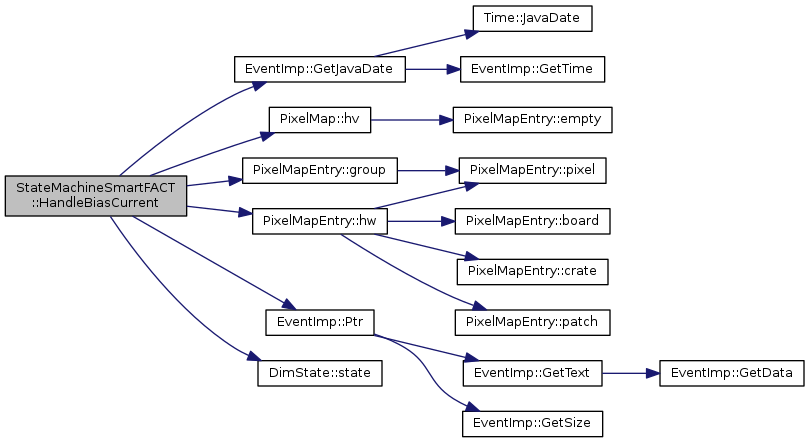
 Here is the call graph for this function:
Here is the call graph for this function: 1.8.11
1.8.11