|
FACT++
1.0
|
|
FACT++
1.0
|
| void eraRv2m | ( | double | w[3], |
| double | r[3][3] | ||
| ) |
Definition at line 3 of file rv2m.c.
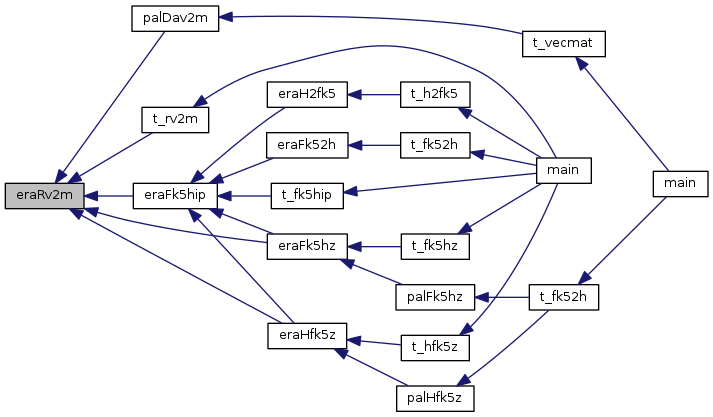
Referenced by eraFk5hip(), eraFk5hz(), eraHfk5z(), palDav2m(), and t_rv2m().
 Here is the caller graph for this function:
Here is the caller graph for this function: 1.8.11
1.8.11