860 int nSlicesToRemove = 60;
861 float* backupData = 0;
864 backupData =
new float[nSlicesToRemove*160];
865 for (
int i=0;
i<1440;
i++)
868 const int pixelIdInPatch = mapEntry.
pixel();
869 const int patchId = mapEntry.
patch();
870 const int boardId = mapEntry.
board();
871 const int crateId = mapEntry.
crate();
873 const int hw = mapEntry.
hw();
874 if (pixelIdInPatch == 8)
876 for (
int j=0;j<nSlicesToRemove;j++)
878 backupData[(40*crateId + 4*boardId + patchId)*nSlicesToRemove+j] =
eventData[(hw*
nRoi) + (
nRoi-nSlicesToRemove) + j];
885 vector<float> pixelStatsData(1440*4);
888 for (vector<PixelMapEntry>::const_iterator it=
fPixelMap.begin(); it!=
fPixelMap.end(); it++)
890 Meanvalues[it->index] = pixelStatsData[0*1440+it->hw()];
891 RMSvalues[it->index] = pixelStatsData[1*1440+it->hw()];
892 Maxvalues[it->index] = pixelStatsData[2*1440+it->hw()];
897 for (
int i=0;
i<1440;
i++)
900 const int pixelIdInPatch = mapEntry.
pixel();
901 const int patchId = mapEntry.
patch();
902 const int boardId = mapEntry.
board();
903 const int crateId = mapEntry.
crate();
905 cout <<
"Voila mon probleme: " << patchId << endl;
906 const int hw = mapEntry.
hw();
907 if (pixelIdInPatch == 8)
910 for (
int j=0;j<nSlicesToRemove;j++)
912 eventData[(hw*
nRoi) + (
nRoi - nSlicesToRemove) + j] = backupData[(40*crateId + 4*boardId + patchId)*nSlicesToRemove+j];
int crate() const
Bias supply channel.
valarray< double > RMSvalues
valarray< double > Maxvalues
valarray< double > PosOfMaxvalues
bool Apply(float *vec, const int16_t *val, const int16_t *start, uint32_t roi)
static void RemoveSpikes(float *p, uint32_t roi)
const PixelMapEntry & index(int idx) const
static PixelMap fPixelMap
valarray< double > Meanvalues
static double GetPixelStats(float *ptr, const float *data, uint16_t roi, uint16_t begskip=0, uint16_t endskip=0)
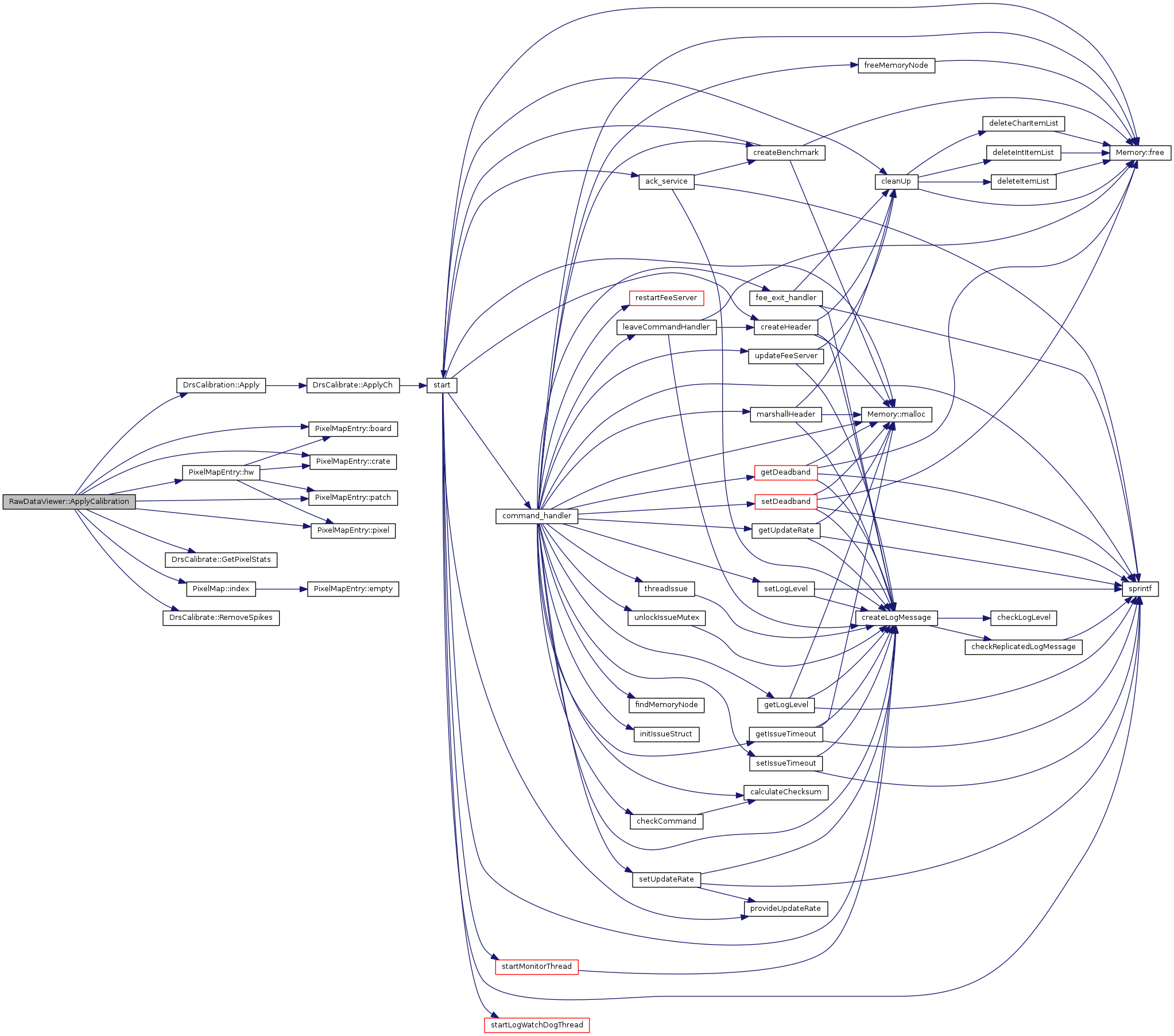
 Here is the call graph for this function:
Here is the call graph for this function: 1.8.11
1.8.11